Archive
A first stab a low resolution image enhancement
Team Clarify-the-Heat (Gary, Pavel and yours truly) were at a hackathon sponsored by Flir at the weekend.
The FlirONE contains an infrared sensor with 160 by 120 pixels, plus an optical sensor that provides a higher resolution image that can be overlaid with the thermal, that attaches to the USB port of an Android phone or iPhone. The sensor frequency range is 8 to 14 µm, i.e., ‘real’ infrared, not the side-band sliver obtained by removing the filter from visual light sensors.
At 160 by 120 the IR sensor resolution is relatively low, compared to today’s optical sensors, and team Clarify-the-Heat decided to create an iPhone App that merged multiple images to create a higher resolution image (subpixel interpolation) in real-time. An iPhone was used because the Flir software for this platform has been around longer (Android support is on its first release) and image processing requires lots of cpu power (i.e., compiled Objective-C is likely to be a lot faster than interpreted Java). The FlirONE frame rate is 8.6 images per second.
Modern smart phones contain 3-axis gyroscopes and data on change of rotational orientation was used to find the pixels from two images that corresponded to the same area of the viewed 2-D image. Phone gyroscope sensors drift over periods of a few seconds, some experimentation found that over a period of a few seconds the drift on Gary’s iPhone was safely under a tenth of a degree; one infrared pixel had a field of view of approximately 1/3 degrees horizontally and 1/4 degrees vertically. Some phone gyroscope sensors are known to be sensitive enough to pick up the vibrations caused by local conversations.
The plan was to get an App running in realtime on the iPhone. In practice debugging a couple of problems ate up the hours and the system demonstrated uploaded data from the iPhone to a server which a laptop read and processed two images to create a higher resolution result (the intensity from the overlapping pixels is averaged to double, in our case, the resolution). This approach is very primitive compared to the algorithms that do sub-pixel enhancement by detecting image features (late in the day we found out that OpenCV supports some of this kind of stuff), but it requires image less image processing and should be practical in real-time on a phone.
We discovered that the ‘raw’ data returned by the FlirONE API has been upsampled to produce a 320 by 240 image. This means that the gyroscope data, used to align image pixels, has to be twice as accurate. We did not try to use magnetic field data (while not accurate the values do not drift) to filter the gyroscope readings.
Two IR images from a FlirOne, of yours truly, and a ‘higher’ resolution image below:
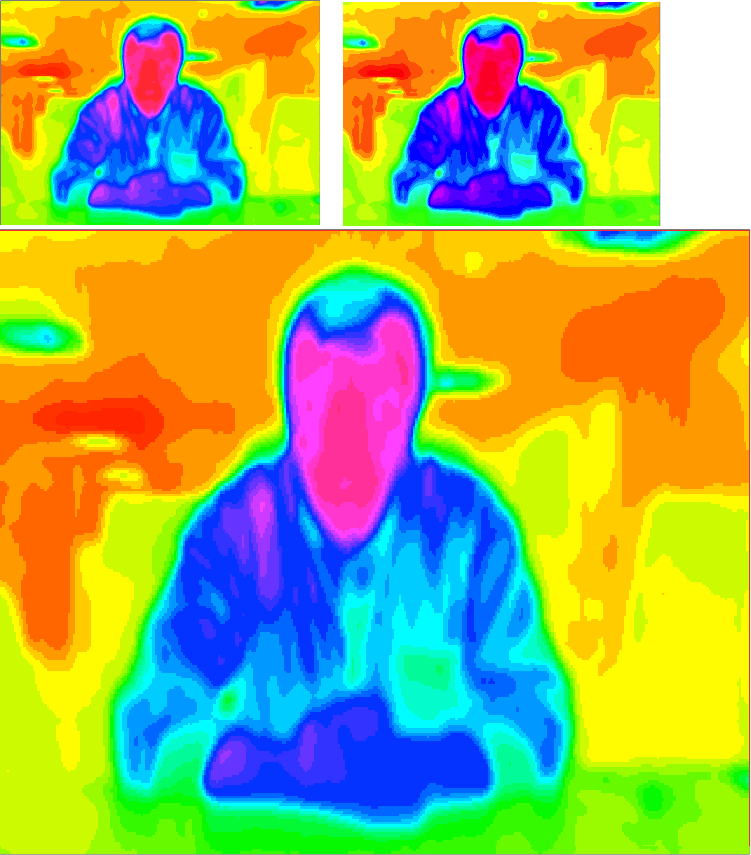
The enhanced image shows more detail in places, but would obviously benefit from input from more images. The technique relies on partial overlap between pixels, which is a hit and miss affair (we were managing to extract around 5 images per second but did not get as far as merging more than two images at a time).
Team Clarify-the_Heat got an honorable mention, but then so did half the 13 teams present, and I won a FlirONE in one of the hourly draws 🙂 It looks like they will be priced around $250 when they go on sale in mid-August. I wonder how long it will take before they are integrated into phones (yet more megapixels in the visual spectrum is a bit pointless)?
I thought the best project of the event was by James Rampersad, who used processed the IR video stream using Eulerian Video Magnification to how blood pulsing through his face.
Recent Comments